
Research on Hand Prosthesis Design
Purpose of Research:
To develop devices to improve the quality of life for disabled persons. This work explores how electro-mechanical upper limbs can help to replace lost function for amputees. Research into how the user interact with their device, in terms of communicating and receiving feedback from the device. We seek to develop devices that provide the most natural experience for the user. In this regard, can the interaction be highly intuitive, can the device be minimally invasive, and appear cosmetically natural?
Goals:
Development of prosthetic hands with adaptive grasp is a primary goal. This allows for both: (a) a more secure grasp of objects, and (b) a more natural looking grasp, beyond that of conventional prosthetic hands. As well, other goals include major aspects of prosthesis development, which are: Control, Feedback, Cosmetics, Size/Weight, Power, Cost and Maintenance.
Design & Research Objectives:
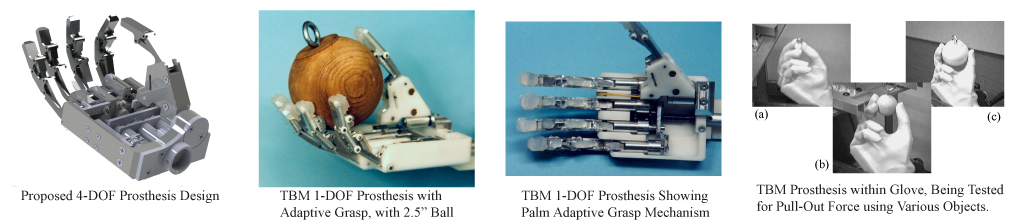
(1) Adaptive grasp: The ability of the fingers to conform around the shape of an object held in the hand. As the hand closes around an object, the four fingers and thumb will flex (curl) inwards independently of each other and approximately conform to the shape of an object being grasped. The grasp of irregular objects (cube, tool, ball, etc...) will all result in a different grasps, even based on orientation within the hand.
(2) Ease of control for amputee: Control of the device must be easy and intuitive. Control must be robust to ensure desired action, and to prevent/minimize unwanted operation. Sensor design for bio-signals (a major aspect of this work, see biomedical systems page) is integral with the control strategies being researched.
(3) Feedback to the amputee: Presently, amputee users of conventional prosthesis rely on visual feedback and other indirect methods to manipulate objects. An important direction of our research is exploring new methods to provide feedback directly to amputees (see biomedical systems page), such as stimulators.
(4) Cosmetic appearance: The natural appearance of a hand prosthesis is highly important, in terms of both static (stationary) and dynamic (moving) appearance. Our designs strive for natural, anthropometric form.
(5)Scalable design: Prototype prosthesis designs are sized for an average 11 year old child’s hand. Ideally, weight should also be equal or less than a similarly sized conventional prosthetic hand. By aiming for this objective, the design becomes scalable for larger/older users.
(6) Low power design: Power consumption has a direct impact to the utility of a prosthesis, and must be minimized.
(7) Robust design: The prosthesis must be strong, durable and be capable of sufficient grip strength to accomodate the the required tasks. In particular, the tri-digital (three fingered) pinch force should be at least of 50+ N.
(8) Low cost, easy maintenance: The prosthesis must be designed for low-cost fabrication to ensure wide-scale adoption. Maintenance should be easy and infrequent, expected after 250,000 open/close cycles.
Current Prosthesis Research Activities:
(i) Re-design of the TBM 1-DOF prosthesis for fabrication using 3D Printing (rapid prototyping). This includes the finger joints, the palm, and several internal mechanisms.
(ii) Development of a 4-DOF, four actuator prosthetic hand, to be used with an ultrasonic-based sensing and control strategy.
(iii) Advanced mechanical wrist prosthesis systems.
(iv) Multi-degree-of-freedom (i.e. multi-channel) sensory and control strategies, for multi-DOF prosthesis, as well as novel methods of user-control of such prosthesis.
Recent Hand Related Research:
(v) A mechatronic hand rehabilitation system employing CPM (continuous passive motion) and active resistance methods. This work is done in collaboration with local hand rehabilitation health providers.
Expertise:
Our team members have expertise in the areas of: mechatronic system design, finite element method (FEM) simulation, bio-signal acquisition and processing, and human upper limb physiology. Please contact us by email for further information regarding this research.